Adoo Darko Jonathanadoodevv.hashnode.dev·18 hours agoBuilding The RobotIntroduction In this post, we’ll explore the design of a differential-drive robot and create its URDF model. This robot will serve as the foundation for the rest of this series. Much of what I’ve learned here comes from Josh Newans’ excellent YouTube...Simulating and Building a Mobile RobotROS
Adoo Darko Jonathanadoodevv.hashnode.dev·Dec 15, 2024Project OverviewIntroduction My journey into robotics began in grade 5 when I joined my school’s robotics club. Over the years, my passion for robotics has only grown. When I started college, my mentors introduced me to the World Robot Olympiad's Future Engineers ca...113 readsSimulating and Building a Mobile RobotROS
Aditya Kamathkamathsblog.com·Dec 1, 2024ROSCon 2024 - Odense 🇩🇰If you follow me on Twitter or Instagram, you’ve probably seen that I recently enjoyed a fantastic few days off in Denmark. I needed a proper holiday and decided to explore Denmark, including attending ROSCon 2024 during the trip. This was my second ...ROSConrobotics
Abdulsalam Lukmonlearn-with-litmus.hashnode.dev·Sep 18, 2024Episode 1: Redefining your ROS development workflow with Docker DevContainerRobotics, being an interesting field, has some barriers to beginners, some of the barriers include the cost of computing resources required for development. For example. The Robotics Operating System (ROS) requires a Virtual Machine or Raspberry Pi f...robotics
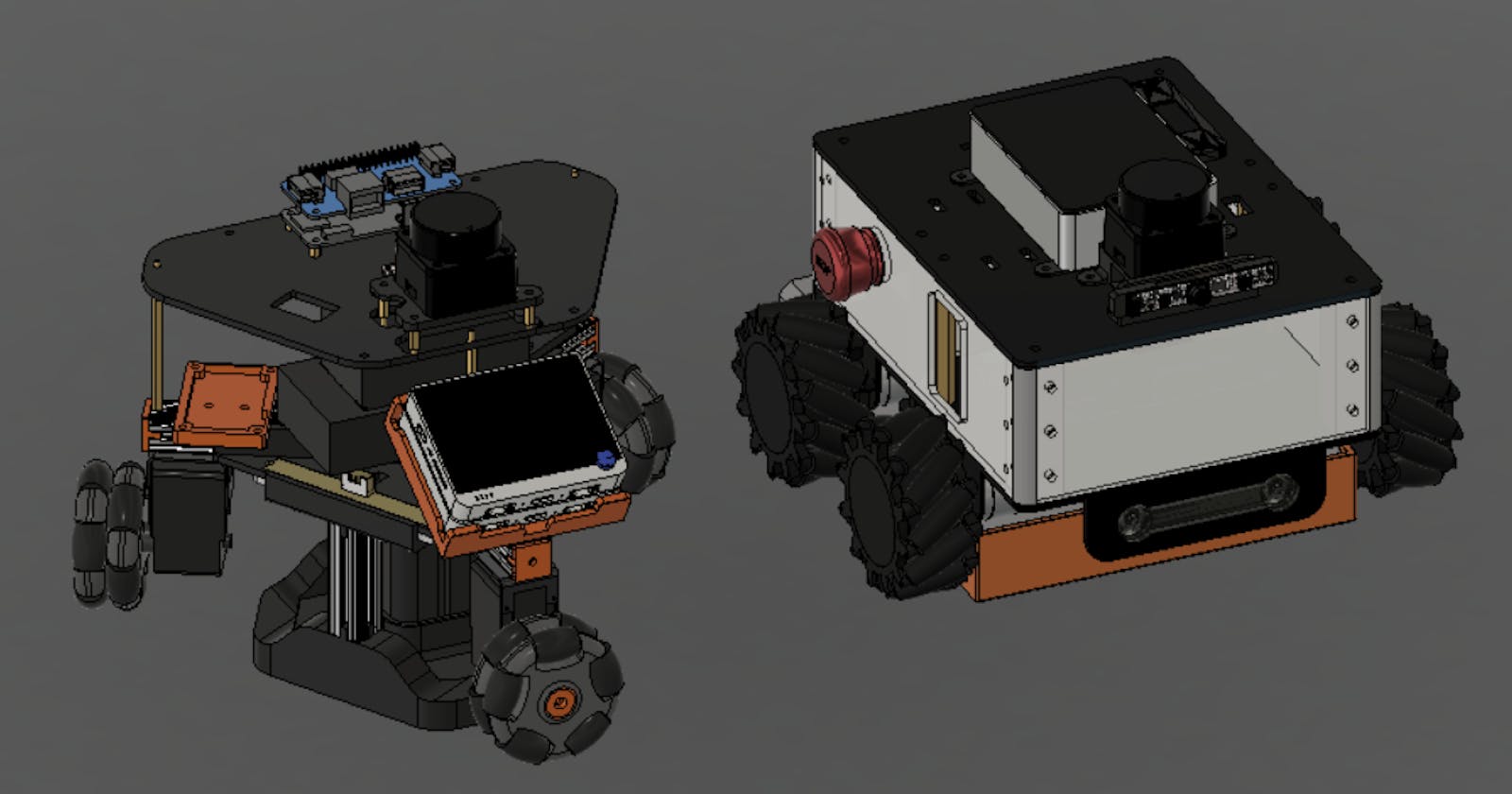
Aditya Kamathkamathsblog.com·Aug 30, 2024Building a Pan-Tilt MechanismBefore I begin, note that this post follows an earlier article about driving serial bus servo motors, where I tried different things with the Feetech STS3215 motors and their SCServo_Linux C++ library. This was all in the context of the 3-wheeled omn...202 readsROS 2robotics
Jishnu Sureshlonebots.hashnode.dev·Jul 7, 2024Building a Ping-Pong Game with TurtlesimApplying what you have learned through hands-on projects is one of the best ways to solidify your understanding. I decided to build a ping-pong game using the Turtlesim simulator, and I’d like to share my experience. Let’s call this project “turtlesi...10 likesROS
Hankyu Kimhankyukim.hashnode.dev·Jun 4, 2024How to set robot communication cycle?Q. I have a question when we communicate with a robot. The cycle changes from 2ms to 3ms or 5ms while socket programming with the robot. How do people usually set the communication cycle regularly? A. You have to match it with the robot's embedded b...SW
Mayank Sharmamayank2001.hashnode.dev·Feb 4, 2024Configuring ROS Environment , Navigating ROS Filesystem and Creating ROS packageBefore starting these tutorials please complete installation configuring ROS Environment: If you are ever having problems finding or using your ROS packages make sure that you have your environment properly setup. A good way to check is to ensure tha...20 likes·105 readsROS
Mayank Sharmamayank2001.hashnode.dev·Feb 4, 2024Installation of ROS distro Melodic in Ubuntu 18.04ROS (Robot Operating System) Distro, short for "Distribution," refers to a specific release version of ROS. ROS is not a single software package but a collection of tools, libraries, and conventions for developing robotic software. These releases are...10 likesmelodic
Aditya Kamathkamathsblog.com·Dec 28, 20232023: A year in reviewIn my last post of 2023, I'll try to summarize what I've been up to these last few months. Firstly, I've been playing around with some more sensors - a VL53L7CX ToF Imager, a Raspberry Pi Sense HAT, and a new controller - an 8BitDo SN30 Pro gamepad. ...132 readsYear in ReviewROS